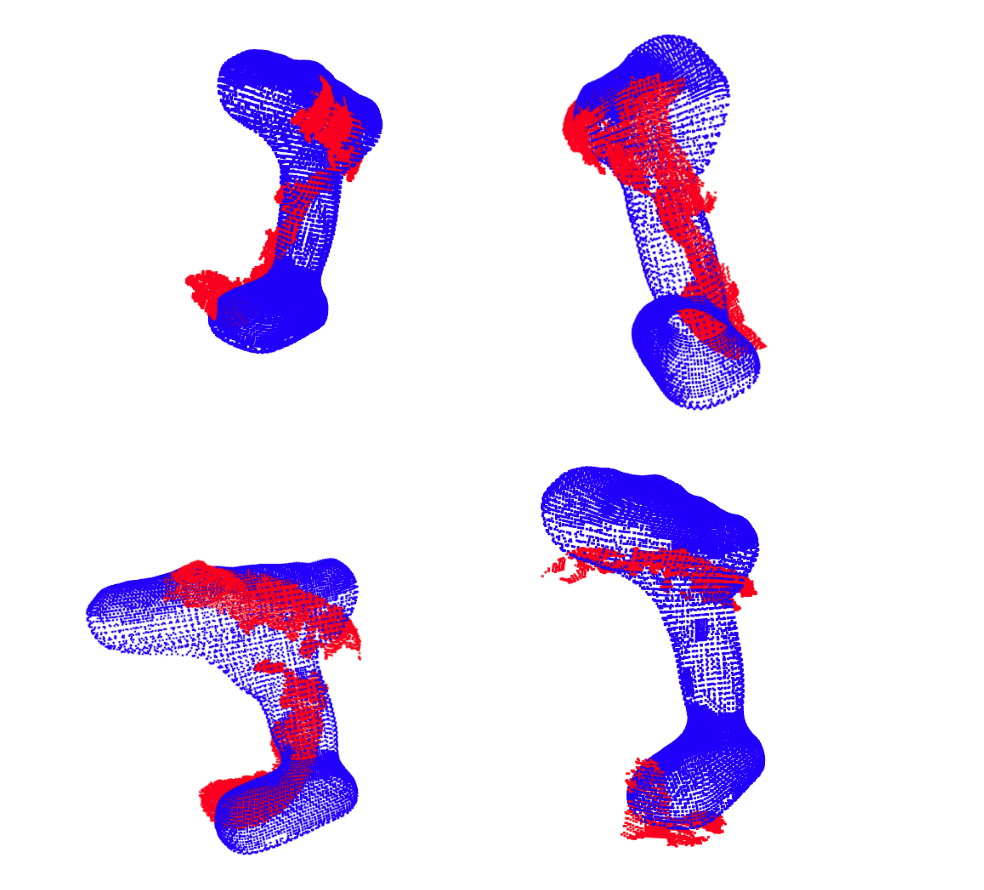
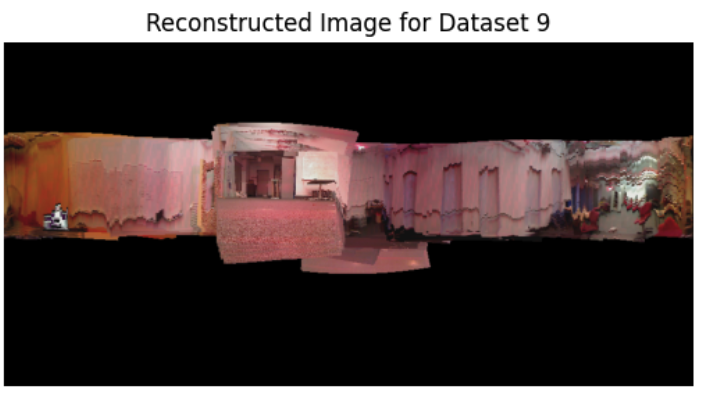
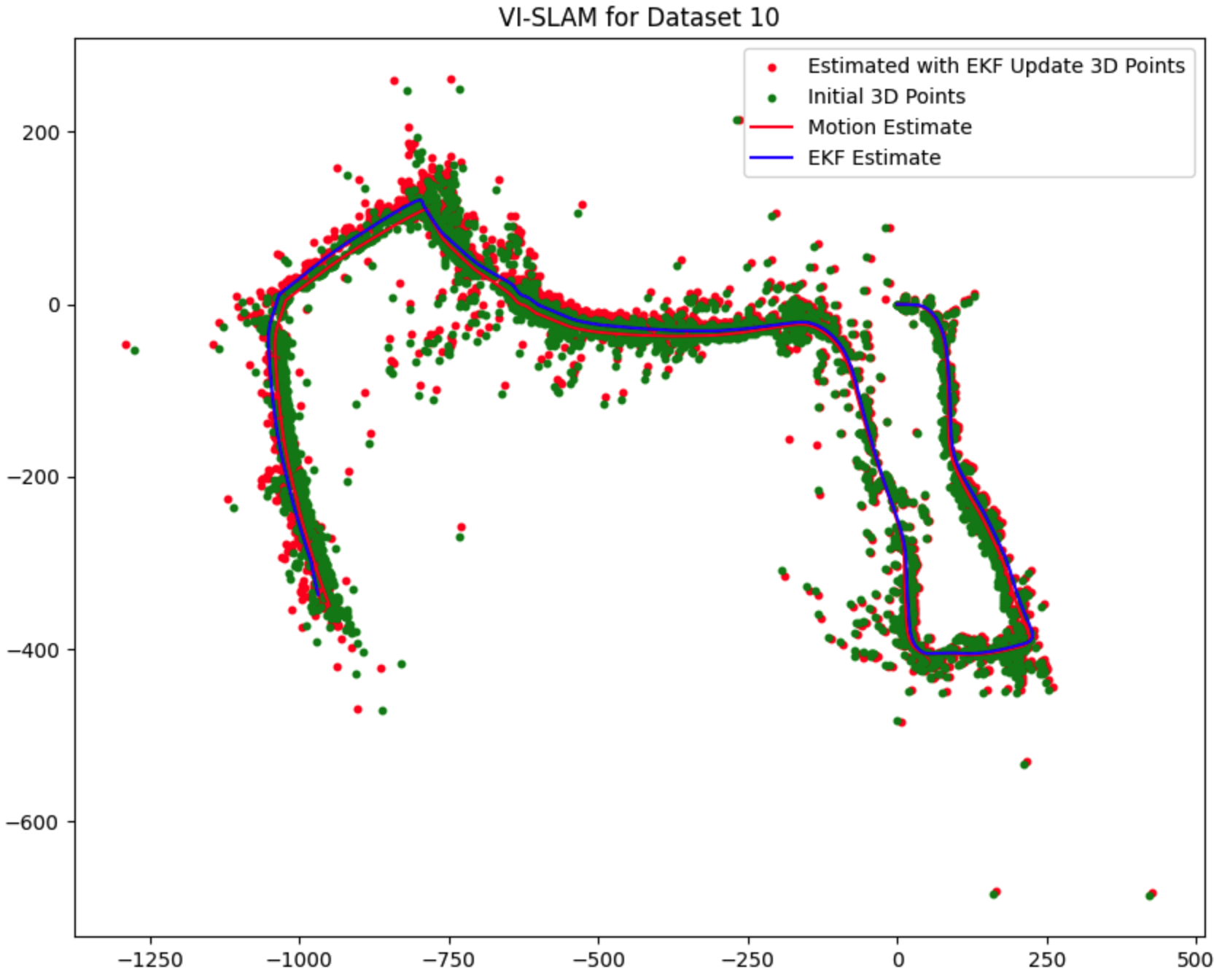
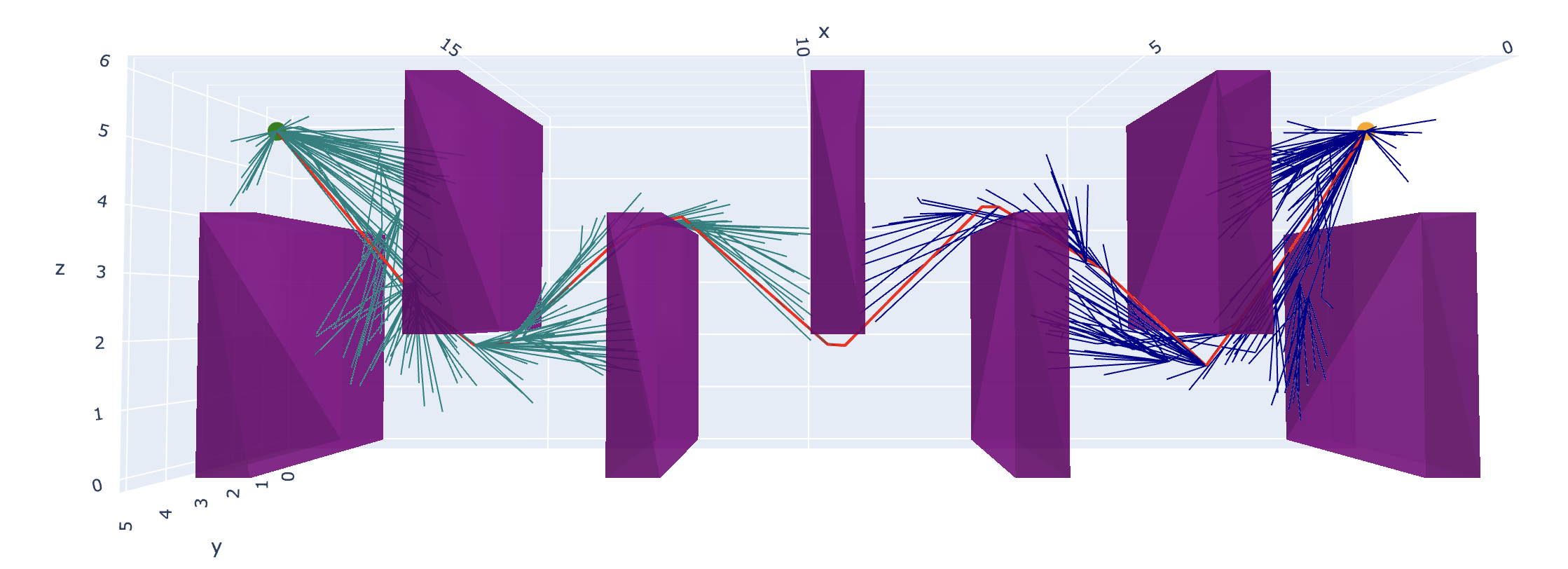
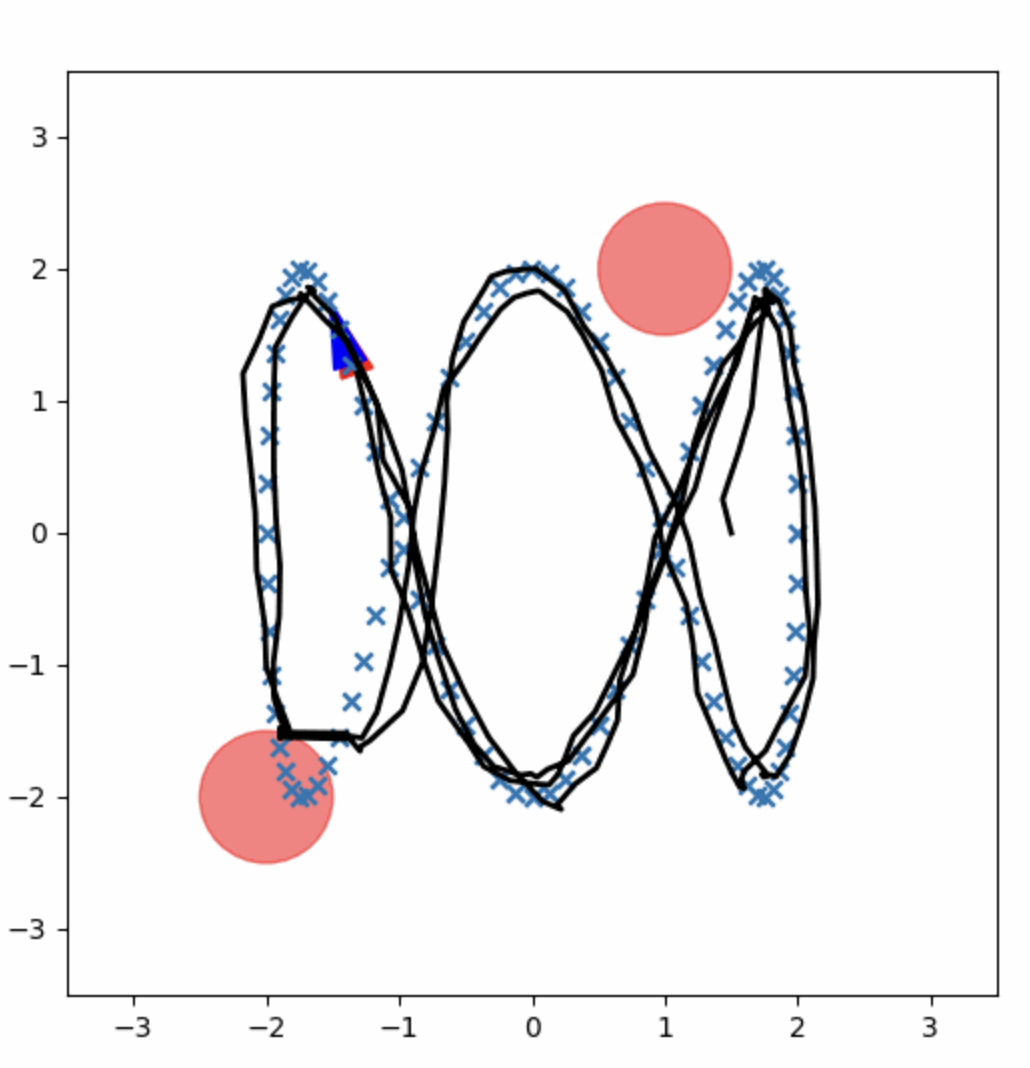
The core aim of this project was to implement Simultaneous Localization And Mapping (SLAM) utilizing data from various sensors, including IMUs (Inertial Measurement Units), Encoders, Lidar, and RGBD cameras. My approach involved executing Dead Reckoning with the assistance of IMU and Encoder data to estimate initial trajectories. I enhanced these estimations through the application of the Iterative Closest Point (ICP) algorithm on Lidar data, followed by the integration of factor graphs to refine my trajectory predictions further. Utilizing the refined trajectories, I generated Occupancy Grid maps and Texture maps. The texture maps effectively correlate pixel colors captured by the camera to locations within the global map, providing a robust framework for robotic navigation and environment interaction.